May 12,2022
Detección mediante sensores táctiles capacitivos. Una aplicación con un mínimo de componentes externos
by Marcel Lundberg
La adición de funcionalidades de pantalla táctil es cada vez más popular en tecnología electrónica y de móviles debido a su facilidad de uso y su aspecto atractivo. Para los fabricantes comporta el beneficio adicional de que no implica ningún movimiento mecánico, puesto que se pueden fabricar sensores táctiles capacitivos utilizando un substrato de cobre en el diseño del circuito impreso.
Describiremos en este artículo como puede usarse una técnica que consta de un Divisor de Tensión Capacitivo (CVD) (por Capacitance Voltage Divider en inglés) y un microcontrolador periférico denominado Unidad de Medida del Tiempo de Carga (CTMU) (por Charge Time Measurement Unit en inglés) para disponer de sensores táctiles capacitivos de bajo coste y con un mínimo de componentes externos. Finalmente, un diseño de referencia mostrará también como reemplazar interruptores mecánicos por teclas táctiles capacitivas.
Tecnología de los sensores táctiles capacitivos
La ruedecilla de desplazamiento con sensor capacitivo predomina cada vez más en dispositivos electrónicos en comparación con otras tecnologías de sensores táctiles.
Principios de funcionamiento del sensor táctil capacitivo
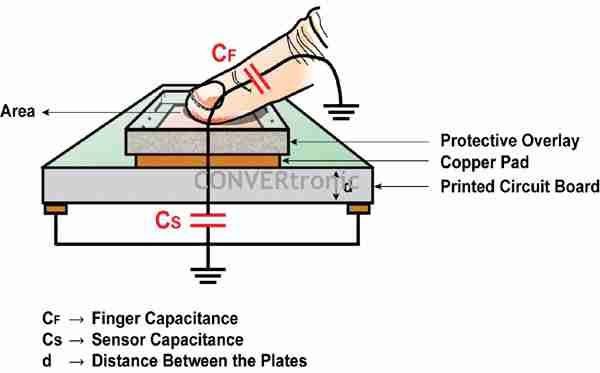
Si un dedo —o cualquier otro objeto con propiedades capacitivas— se aproxima suficientemente a un sensor táctil capacitivo, éste actúa como otro condensador. Esto es debido a la naturaleza dieléctrica del sensor, que varía la capacitancia efectiva del sistema utilizado para detectar el contacto táctil.
La figura 1 muestra como la placa paralela está conectada a la entrada del sensor del chip en tanto que el dedo actúa como otra placa paralela. El hierro contenido en la sangre crea haces de condensadores alineados con la superficie del cuerpo. Cuando dichos haces se aproximan a un conductor crean una capacitancia conectada a tierra, lo cual resulta en un cambio en el valor de la tensión, determinado por el contacto con el dedo.
Un sistema de detección táctil estándar se compone de tres bloques funcionales principales:
Un bloque analógico para detección capacitiva
Un controlador para procesar los datos
Un bloque de interfaz para la comunicación con un procesador host
Las soluciones de detección táctil capacitiva basadas en la variación de la tensión pueden ser llevadas a la práctica con efectividad mediante técnicas que emplean los siguientes componentes:
- Una unidad de medida del tiempo de carga (CTMU) periférica integrada en un microcontrolador
- Un divisor de tensión capacitivo (CVD), utilizando el convertidor de analógico a digital (ADC), que no necesita de un periférico dedicado para la detección capacitiva
* Aplicación efectiva de la detección táctil capacitiva utilizando el periférico CTMU
El periférico CTMU trabaja conjuntamente con un ADC para formar un módulo analógico flexible para la medida precisa de la capacitancia. Como lo demuestra la figura 2, contiene una fuente de corriente constante conectada al canal ADC. La capacitancia cambia y la diferencia de tiempos entre eventos la calcula la CTMU utilizando una fuente de corriente constante.
La respuesta de la CTMU será más rápida que la del CVD porque su fuente de corriente cuenta con varios rangos seleccionables. El tiempo de respuesta del sistema táctil capacitivo mejora debido a la carga más rápida de los canales analógicos.
La utilización de un periférico CTMU para la detección táctil capacitiva queda resumida en la ecuación siguiente:
I x T = C x V
Donde
I es la corriente constante suministrada por la fuente de la CTMU.
T es el tiempo fijo durante el cual la CTMU carga el sensor táctil capacitivo.
C es la capacitancia del sensor táctil capacitivo.
V es la tensión del sensor táctil capacitivo, según es leída por el ADC.
Se puede detectar un desplazamiento relativo de la capacitancia observando un cambio en la tensión si se readapta dicha ecuación:
C = (I x T) / V
Esta ecuación resalta los diferentes pasos involucrados en la detección del contacto táctil, como sigue:
‚ El sensor táctil capacitivo funciona como un condensador y está conectado a un canal multiplexado con el CTMU periférico y el ADC.
‚ El sensor táctil es cargado inicialmente desde una fuente de corriente constante durante un tiempo prefijado (T). La tensión (V) a través del sensor se mide con el ADC (Figura 3).
‚ En tanto no haya cambios en la capacitancia debidos a un contacto táctil en el sensor, dicha tensión permanece relativamente constante en las sucesivas iteraciones de la medición de la carga.
Leyenda:
1. Fuente de corriente de la CTMU inactiva
2. Se efectúa la conversión de analógico a digital (ADC)
3. Descarga del circuito de detección capacitiva
4. Fuente de corriente de la CTMU activa
En conjunción con un ADC multicanal, la disponibilidad de una fuente de corriente constante en la CTMU periférica proporciona una plataforma efectiva de interfaz con el sensor capacitivo táctil. La CTMU periférica se conecta directamente a la entrada del ADC de manera que pueda conectarse con cualquier pin a través del multiplexador analógico. Con esta configuración, una única CTMU periférica puede medir un número de sensores igual al número de canales ADC.
La calibración para contrarrestar la interferencia externa y las pérdidas de transmisión es facilitada por los bits de ajuste asociados con la fuente de corriente.
** El CVD para detección táctil capacitiva
Comparando el condensador fijo, de valor conocido, del circuito de muestreo y retención (S/H) con el sensor capacitivo, de valor desconocido y variable, el método que emplea el divisor de tensión capacitivo (CVD), utiliza únicamente el ADC para efectuar una medición basada en la tensión.
El CVD se fabrica de manera idéntica a un sensor típico; una superficie de cobre sobre un circuito impreso o un substrato conductor similar para la detección, enlazado directamente a un canal ADC. El resto del proceso se completa de manera específica mediante la configuración precisa del ADC y las I/O.
Los principios básicos para el uso del CVD son:
‚ Un canal del ADC carga el condensador interno del circuito de muestreo y retención para el ADC hasta VDD.
‚ A continuación, el canal del sensor es conectado a tierra para llevarlo a un estado conocido (Figura 4).
‚ Después de la conexión a tierra, el sensor debe convertirse de nuevo en una entrada.
‚ Una vez convertido en una entrada, el canal ADC se conecta inmediatamente al sensor.
Se crea un divisor de tensión, puesto que el condensador del sensor está en paralelo con el condensador del circuito de muestreo y retención, CHOLD. Como resultado, las tensiones en el condensador del sensor son las mismas que en el condensador del circuito de muestreo y retención. El ADC debería ser sometido a muestreo y la lectura representa una razón entre los condensadores. Cuando un dedo toca el sensor, su capacitancia se incrementa; la tensión en el sensor será más baja y las lecturas del ADC crecen también.
No es necesaria una lectura de la capacitancia absoluta para la detección táctil capacitiva, porque todas las decisiones de descodificación están relacionadas con los valores de referencia.
Desarrollo del firmware para eliminar las interferencias externas
Las fluctuaciones dinámicas en la capacitancia son causadas por factores como humedad, calor, presión de contacto, contaminantes en los sensores e interferencias EMI/EMC, que inciden en las funcionalidades de los sensores táctiles del sistema. Para contrarrestar dichos factores y robustecer el sistema, se puede utilizar un firmware que permita ejecutar la detección dinámica promedio, la función antirebote y la variación dinámica del nivel de disparo.
Para resistir el ruido residual en el sensor es necesario incorporar un software de filtrado; esto permite al firmware distinguir entre una condición de sensor activado y una de sensor inactivo. El algoritmo puede diseñarse para detectar contactos táctiles múltiples y distinguir entre contactos deseados y no deseados. A continuación el software se puede calibrar para detectar un contacto táctil incluso cuando existe un grueso revestimiento sobre la capa táctil capacitiva.
Diseño de referencia para aplicaciones de detección táctil capacitiva
La Figura 5 ayudará al usuario para iniciar inmediatamente la implementación de un sistema de detección táctil capacitiva. Esta aproximación ofrece gran flexibilidad para integrar otros periféricos, como USB y LCD, en su diseño. Esto puede también contribuir a reducir el tiempo de entrega del sistema de detección táctil en estado totalmente funcional.El microcontrolador usado en el diseño de referencia dispone de 13 canales ADC para conectarse a un máximo de 13 sensores. Se han conectado cuatro sensores táctiles capacitivos a los puertos A0 - A3. El módulo CTMU dispone de una fuente de corriente programable utilizada para cargar los sensores táctiles capacitivos. El zócalo USB se utiliza también como fuente de alimentación (bus-powered), que utiliza una interfaz USB on-chip. El firmware también puede proporcionar información exhibiendo el estado apropiado del sensor táctil en el módulo LCD, a través de los pines del puerto D cuando se toca el sensor. Se suministra también un conector macho de 6 pines para conectar el panel de referencia a un programador de hardware
Factores que contribuyen al diseño de sensores táctiles capacitivos efectivos*
Las aplicaciones en tiempo real presentan una serie de desafíos para los sensores táctiles capacitivos. El diseño puede colaborar en la reducción de las capacitancias parásitas y en el incremento de la capacitancia de los dedos, asegurando en última instancia un mejor diseño de los sensores como se detalla a continuación:
Tamaño del substrato del sensor. La forma del substrato del sensor no reviste importancia para un sensor capacitivo, pero el área del sustrato determina su sensibilidad y, en consecuencia, merece consideración. Cuanto más grande sea, mejor es la sensibilidad; el área debería ser del tamaño promedio de la huella del contacto de un dedo (15 x 15 mm), pero si el tamaño del substrato del sensor es mayor que el óptimo, la capacitancia parásita puede verse incrementada a causa de la proximidad a la tierra.
Separación entre sensores. Cuando se toca un sensor, el dedo introduce una capacitancia adicional, no solo en el sensor activado sino también en los próximos. Por lo tanto, para aislar la capacitancia del dedo hay que mantener un espacio entre los sensores adyacentes. La separación ideal es de 2 a 3 veces el espesor del material de recubrimiento del sistema de detección táctil capacitiva. Sirva como ejemplo, si el espesor del recubrimiento es de 3 mm, la distancia entre sensores debería ser de 6 a 9 mm para un diseño eficaz de detección táctil capacitiva.
Longitud de la pista del circuito impreso. La longitud de la pista entre el sensor y el microcontrolador puede crear una mayor susceptibilidad a las capacitancias parásitas si es excesivamente larga. Esto podría cambiar la resistencia de la pista y afectar la sensibilidad. La longitud de la pista no debería exceder de 12” (300 mm).
Composición y espesor del recubrimiento. La capacitancia de un dedo transmitida al sensor táctil capacitivo está determinada por el tipo de material de recubrimiento usado y por su espesor. El material de recubrimiento debe de poseer una elevada constante dieléctrica para incrementar la sensibilidad y ser lo más fino posible. Si el espesor del recubrimiento aumenta, la interferencia (crosstalk) entre los sensores se incrementa también.
Técnicas de conexión a tierra. El método de detección es afectado por la capacitancia parásita de un sensor respecto a tierra; esta situación se puede contrarrestar situando la tierra muy cerca del sensor. Esto aumenta la capacitancia parásita y reduce su efecto sobre el sensor.
Selección del adhesivo. El adhesivo fija el material de recubrimiento al circuito impreso y se deberá aplicar en forma de capa fina para conseguir una alta sensibilidad. No deberá contener burbujas de aire y todas las instrucciones para su aplicación deberán ser estudiadas antes de proceder a su aplicación.
Resumen
Con la disminución del coste de la tecnología de sensores táctiles, esta es en la actualidad una opción ideal para productos tanto industriales como de consumo. La principal ventaja sobre los interruptores mecánicos tradicionales es que los sensores táctiles capacitivos no se desgastan por un largo período. Utilizando un periférico CTMU con un microcontrolador on-chip o la técnica CVD, los diseñadores pueden desarrollar interfaces con sensores táctiles capacitivos a bajo coste y con un mínimo de componentes.
Si necesita más información, visite
Referencias
1. PIC24F Family Reference Manual, Sect. 11 Charge Time Measurement Unit (CTMU), DS39724B (Sección 11 del Manual de referencia de la familia PIC24F, Unidad de medida del tiempo de carga (CTMU), DS39724B), © 2010 Microchip Technology Inc.
2. Notas de aplicación de Microchip:
AN1101, Introduction to Capacitive Sensing (Introducción a la detección capacitiva) por Tom Perme, © 2007 Microchip Technology Inc.
AN1334, Techniques for Robust Touch Sensing Design (Técnicas para diseños de sensores táctiles capacitivos robustos) por Burke Davison, © 2010 Microchip Technology Inc.
AN1250, Microchip CTMU for Capacitive-Touch Applications (Microchip CTMU para aplicaciones táctiles capacitivas) por Bruce Bohn, © 2009 Microchip Technology Inc.
AN1298, Capacitive Touch Using Only an ADC [CVD] (Detección táctil capacitiva usando únicamente un ADC [CVD]) por Tom Perme, © 2009 Microchip Technology Inc.
Autor:
Por: Nithin Kumar Mada - Ingeniero Senior de aplicaciones
Harsha Jagadish - Ingeniero de aplicaciones
División de Arquitectura avanzada de microcontroladores - Microchip Technology Inc.
Más información o presupuesto